
Después de estos 5 artículos sobre radares, ya tenemos conocimientos suficientes como para hacernos una idea de cómo funciona grosso modo nuestro detector de radar.
Hagamos una pequeña recapitulación. Un radar de la DGT emite un haz estrecho de microondas a una frecuencia que ronda los 34GHz. Este haz de microondas choca contra el vehículo y rebota volviendo al radar emisor… pero no solo es recibida esta señal por los radares de la DGT, la oem reflejada sigue viajando por el espacio hasta que, nuestro receptor de radar la intercepta.
Es entonces cuando, una vez captada por nuestro receptor, pasa por todos los pasos que hemos visto en estos artículos hasta llegar a obtener una señal que es tratada por la electrónica y nos avisa que nuestro detector, ha detectado una frecuencia que sabemos que corresponde a los radares de la DGT.
Pero fijaros en una cosa, el multanova F6 que vamos a tomar como radar referencia de la DGT ya de por sí emite con una potencia muy baja (en torno a los 0,2 a 0,5 mW), pero como hemos visto nuestro detector de radares no capta este haz emitido por el multanova, sino que capta el rebote de dicho haz, es decir, que lo que nos llega a nuestro receptor es muchísima menos potencia de esos mW lanzados por el multanova. Esto lo notareis cuando tenéis un radar que está apuntando de frente (fácilmente comprobable con los pórticos) que se captan muchísimo antes que los que se encuentran en sentido de la marcha, hay que en el primer caso captamos DIRECTAMENTE el haz emitido por el radar, y en el segundo caso lo que captamos son los múltiples rebotes del haz en todo lo que se menea… ( el coche de delante, la carretera, una piedra, etc).
Entonces, visto que lo que capta nuestro detector es una señal pequeñísima, es por lo que es necesario la utilización de AMPLIFICADORES.
¿QUE ES UN AMPLIFICADOR?
Como su mismo nombre indica, un amplificador es un componente que “amplifica”, es decir, que a su salida se obtiene la misma señal que a la entrada pero mucho mas grande.
Estamos acostumbrados a los amplificadores de sonido, el que tenemos en el equipo de música, que lo que hace es amplificar unos milivoltios que salen de nuestro reproductor de CDs, a unos cuantos voltios que es lo que se meten en los altavoces, y posteriormente sale sonido de ellos.
Pero la vida está llena de máquinas amplificadoras, por ejemplo una palanca podría ser una especie de amplificador mecánico, yo levanto un montón de kilos simplemente aplicando una pequeña fuerza en un extremo de la palanca. Todo aquello que haga que algo “pequeño” se reproduzca en “algo grande” se podrá considerar amplificador
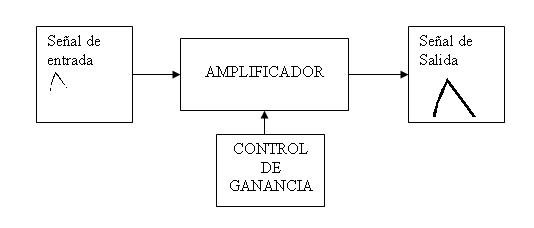
Pero vamos a dejar de desvariar y a centrarnos en el caso que nos ataña del amplificador electrónico. Tomaremos al amplificador en nuestro caso como una caja negra que tiene una entrada, un control y una salida.
CARACTERISTICAS DE UN AMPLIFICADOR
Ganancia: Quizás es el factor que más estamos acostumbrados a manejar en nuestra vida común, es el “control de volumen” del amplificador del equipo de música, es cuanto amplifica nuestro amplificador.
En nuestro caso sería conveniente una ganancia máxima, pero los amplificadores tienen límites, no podemos amplificar todo lo que nos dé la gana ya que existe una ganancia máxima que depende de las características constructivas del amplificador.
Los amplificadores pueden tener una ganancia fija o una ganancia variable, que puede ser controlada por ejemplo por nuestra electrónica, nuestra manita en el equipo de música, o incluso es muy habitual los CAG (Controles Automáticos de Ganancia) que lo que hacen es que cuando la señal de entrada es débil, automáticamente aumenta la ganancia del amplificador mientras que cuando la señal de entrada va siendo mas fuerte, automáticamente disminuye la ganancia, obteniéndose de esta manera que la señal de salida tiene un “volumen” mas o menos constante independiente del nivel de entrada. Esto se ve claramente en un ejemplo, en una conferencia: 2 conferenciantes van a hablar por el mismo micrófono, entonces conferencia el primero que tiene una voz muy bajita, mientras que el segundo conferenciante tiene una voz mucho mas alta… sin embargo en el auditorio el público escuchará a ambos conferenciantes con el mismo nivel de voz gracias a un sistema de CAG.
Distorsión: Desgraciadamente los amplificadores no son ideales y todos tienen sus “pegas”, un factor que mide lo “bueno” que es un amplificador es el “factor de distorsión”. En un amplificador ideal, la señal de salida debería ser un calco idéntico amplificado de la señal de entrada, pero esto no ocurre, la señal de salida tiene “pequeñas” imperfecciones con respecto a la señal de entrada.
Contra mayor sea la distorsión de un amplificador mas imperfecciones tendrá la señal de salida con respecto a la de entrada.
En nuestro caso, en los detectores de radar, quizás este factor no sea tan importante como pudiera ser, por ejemplo, la recepción de un canal de datos, ya que en realidad el detector lo único que hace es decir si hay o no hay una señal de radar, pero no decodifica ninguna información, pero este efecto produce “espúreas” que como dijimos en otros artículos es mejor evitar. Así que contra menor distorsión tenga el amplificador mejor.
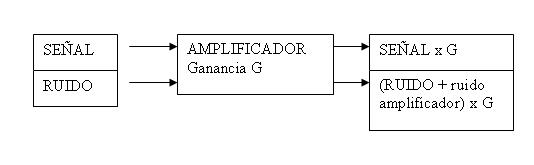
Factor de ruido: Siguiendo el concepto de que nuestros amplificadores no son nada ideales, comprobamos que la “caja negra” que forman nuestros amplificadores generan ellas solitas un “ruido” que nada tiene que ver con nuestra señal de entrada. Esto nos limita, por ejemplo, en la ganancia de nuestro amplificador, ya que el amplificador amplifica todo, la señal que entra y el ruido.
El factor de ruido es el resultado del cociente de la relación señal/ruido de la entrada y la relación señal/ruido de la salida, contra mas pequeño sea este factor mucho mejor… si, ya se, a la mayoría de la gente se le ha quedado cara de ajopuerro al ver esta definición, pero vamos a aclararla y veréis lo fácil que es.
Primero vamos a explicar lo que es la relación señal/ruido, para ello imaginémonos que estamos en una biblioteca, y queremos decirle algo al compañero que tenemos al lado, en la biblioteca casi no hay ruido, un pequeño murmullo muy de fondo quizás y poco mas, entonces en este caso la señal será lo que le tenemos que decir al compañero, y el ruido el que existe en la biblioteca, la relación señal/ ruido es excelente.
Pero ahora nos vamos de marcha, y nos vamos con el mismo compañero a una discoteca, ahí el ruido es infernal, el bakalao chunda chunda perfora nuestros tímpanos, casi no oímos ni nuestras propias ideas… entonces decirla al compañero cualquier cosa, es prácticamente imposible, el ruido nos lo tapa todo… la relación señal/ ruido es desastrosa.
Una vez que sabemos lo que es la relación señal/ruido, entenderemos fácilmente lo que es el factor de ruido, quiere decir que es la relación entre la relación señal ruido de entrada, y la que se obtiene a la salida, vemos si el amplificador ha metido él ruido por si mismo o no, ya que la señal sola sería amplificada, y si el amplificador no metiese ruido, el ruido de la entrada sería amplificado igualmente, la relación señal ruido de la salida no variaría, pero como el amplificador no es ideal, y algo de ruido mete, entonces digamos así que, a la salida, siempre tendremos un poquito mas de ruido que a la entrada, pero si el amplificador es bueno, pues entonces no será mucho mas.
Frecuencias de corte: Este término nos resulta ya familiar porque lo vimos en el artículo donde hablábamos de los filtros. Los amplificadores, sobre todo los de alta frecuencia como los que nos ataña, no amplifican todas las frecuencias por igual, se diseñan para que su ganancia máxima sea en una frecuencia determinada y luego, se comprueba al igual que en los filtros que en un “ancho de banda” se los puede considerar aptos, y que fuera de este ancho de banda ya la amplificación es baja.
Gracias a este efecto, muchos amplificadores se diseñan de tal manera que sirven también de filtros pasa-banda de tal manera que nos pueden ser útiles en nuestros procesos de heterodinaje ya que así, el filtro pasa banda de la F.I puede ser apoyado, o incluso sustituido por un amplificador que posea una banda muy estrecha de paso.
En la práctica, muchas veces se suelen hacer híbridos de amplificadores y filtros para conseguir una “caja negra” de amplificador y filtro en uno.
OSCILADORES: CASI UN AMPLIFICADOR
Un oscilador, pecando de Perogrullo, es un elemento que autooscila. Un típico oscilador mecánico es el péndulo de cucu de la pared, un elemento que en el caso de los relojes se utiliza como patrón de tiempo ya que el tiempo que tarda el péndulo de ir de un extremo a otro, es siempre el mismo. Evidentemente un péndulo necesita algo de energía para que oscile indefinidamente (en el caso del cucú la cuerda). Igualmente el oscilador electrónico precisa de energía para que el mismo oscile.
No voy a entrar en teoría de circuitos resonantes, ni osciladores, voy a referirme un poco a como se genera un oscilador sin entrar demasiado en cuestiones técnicas.
Una manera de generar oscilación electrónicamente es con un sistema realimentado ¿y que es eso? Pues algo tan simple como que la salida que tengo de un circuito electrónico, la utilizo en su totalidad, o en parte como señal de entrada siento esta tratada o no.
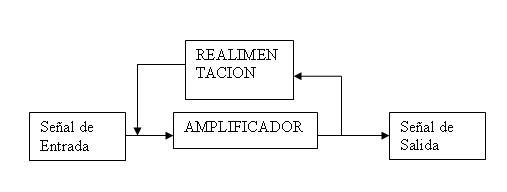
En esta configuración lo que se busca no es la oscilación, es la mejora de las características de la etapa amplificadora, pero como ahora no nos interesa esto sino ¿Cómo generamos la oscilación? Pues vamos a quitar la señal de entrada, y alimentemos nuestro amplificador con su señal de salida, el pez que se muerde su cola:
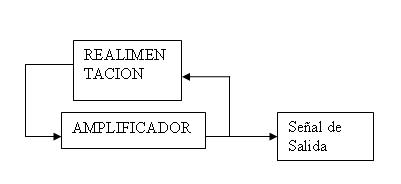
Si el amplificador fuera ideal, la verdad es que a priori no pasaría nada, ya que si la señal de entrada es cero, la de salida es cero, luego le estamos metiendo cero a la entrada, total… no pasaría nada.
Pero como ya hemos visto, los amplificadores tienen un ruido intrínseco, además cuando encendemos el amplificador produciríamos un ruido de conmutación, que haría que ya no fueran cero las condiciones iniciales de arranque, por lo que aunque la entrada al principio carezca de señal, la salida tiene algo de ruido, este ruido a través de la realimentación es introducido en la entrada y amplificado, obteniendo a la salida una señal mas alta de ruido que a su vez es nuevamente introducida en la entrada y vuelta a amplificar…. Así hasta que el amplificador empieza a oscilar, produciendo una onda senoidal de una frecuencia determinada.
Si no hubiese retraso y desfase entre la señal que sale y la que entra (recordemos que la señal eléctrica no se transmite instantáneamente) el amplificador se saturaría y punto, pero al existir un “desfase” entre la entrada y la salida, sin entrar en detalles, se produce una oscilación. YA TENEMOS UN OSCILADOR.
Un ejemplo cotidiano para entender todo esto que seguramente todos hemos sufrido alguna vez, es cuando hemos jugado con un micrófono, y teníamos puestos los altavoces ¿a que a veces sale un pitido muy desagradable? ¿De donde dale ese pitido? Bueno, pues ese pitido no es ni más ni menos que una oscilación y durante un intervalo breve de tiempo nuestro amplificador se ha convertido en un oscilador.
El micro capta el ruido del altavoz, este es amplificado y vuelve a salir más alto por el altavoz, que nuevamente es recogido por el micro, amplificado y vuelto a salir. Si queréis hacer la prueba, veréis que si alejáis o acercáis el micro al altavoz, la frecuencia del “pitido desagradable” varía ¿y esto por que es? Simplemente porque estamos variando el tiempo de realimentación. El sonido tarda mas o menos en realimentarse dependiendo de lo lejos o cerca que esté el micro del altavoz. Este fenómeno vulgarmente llamado “acoplo” se denomina EFECTO LARSEN (que es la realimentación acústica).
Este es un motivo por el cual a veces, un amplificador que tienen mucha ganancia se vuelve inestable y empieza a oscilar, ya que el más mínimo efecto de realimentación consigue hacerlo poner a oscilar.
Con circuitos adecuados en la realimentación, incorporados a esquemas de amplificación, logramos obtener un oscilador de una frecuencia determinada. Por ejemplo recordemos algo que a todo el mundo nos suena, un cristal de cuarzo, utilizado mucho en los relojes, que lo único que hace es digamos… mantener la oscilación a una frecuencia estable… sin entrar en mas detalles.
CONTROL DE FRECUENCIA EN LOS OSCILADORES
Un buen oscilador ha de generar una oscilación a una frecuencia muy estable, ya que muchos elementos externos como temperatura, sobretensiones, vibraciones, etc. Pueden afectar la frecuencia de oscilador del mismo.
Estabilidad de frecuencia: Es el grado que posee un oscilador para mantener la frecuencia estable dentro de unas tolerancias a la frecuencia de oscilación deseada. Normalmente este factor define los cambios abruptos de frecuencia.
Deriva de frecuencia: Aunque también es una variación en la frecuencia de funcionamiento, se refiere más a una variación lenta de frecuencia (deriva) en el tiempo.
Es habitual que se produzca por calentamiento, si encendemos un oscilador que oscila a una frecuencia F (por ejemplo 30GHz) y la frecuencia permanece estable, pero pasan un par de minutos, horas o incluso días, y el circuito se calienta, hay variaciones mecánicas producidas por la temperatura (por ejemplo dilataciones en los componentes y pistas), variaciones en las resistencias de soldadura, total, que después de media hora encendido, la frecuencia ya no es de F (los 30GHz) sino de F + deriva (por ejemplo 30,1GHz o 29,9GHz) efecto que desde luego no es deseable.
Aunque no es el fin de estos artículos, simplemente decir que existen muchas configuraciones, sistemas de regulación y control, que hacen que estas derivas sean prácticamente cero.
Para los pasos intermedios, donde las F.I. son fijas, los osciladores locales pueden ser de frecuencias fijas, ajustados de fábrica y optimizados a trabajar en las frecuencias de trabajo seleccionadas en nuestro detector.
Incluso como ya hemos visto, podemos sustituirlos filtros de FI por amplificadores con un ancho de banda estrecho (amplificador + filtro) de ganancia variable, con un CAG si fuera el caso (Control Automático de Ganancia) de tal manera que la señal sea amplificada dentro de unos parámetros variables dependiendo de la señal de entrada. Todo esto lo suele gestionar la electrónica.

Pero nos queda un apartado importante sobre el control y estabilidad de la frecuencia del oscilador, y es el oscilador local variable, el primer oscilador que utilizamos para poder “sintonizar” la “emisora que queremos oír” o en nuestro caso, sintonizar la frecuencia del radar de la DGT.
El oscilador variable mas común, sobre todo por su comodidad es el oscilador controlado por voltaje (VCO) ya que es un oscilador diseñado de tal manera que su frecuencia de oscilación de salida es proporcional a una tensión (voltaje) de control.

LA FRECUENCIA DE SALIA ES PROPORCIONAL A V
Existen muchos sistemas diseñados con VCOs, para obtener mas estabilidad, rango, mejor deriva, etc. Pero no voy a entrar en ello, tomemos el oscilador de frecuencia variable como una cajita, con una salida, y un control de frecuencia.
Entonces, recordando como es el receptor
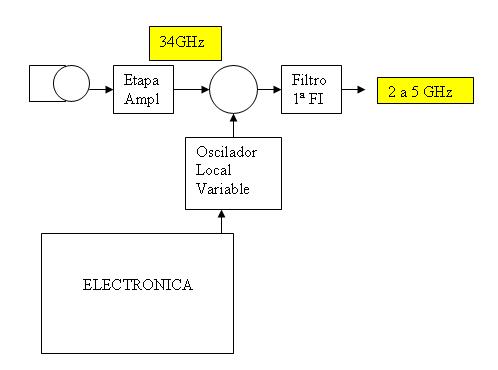
Normalmente el conjunto de antena, amplificador, oscilador local variable y primera FI viene todo integrado dentro de lo que en nuestro detector denominamos como “antena” y es el cacharrito que colocamos en nuestro parachoques.
De ahí los desvelos que últimamente existen sobre los detectores de detectores de radar, ya que si no se encuentran finamente diseñados, este grupo de elementos “radian” aunque muy poco, pero algo radia y es lo que captan los detectores de detectores.
Un buen diseño debería ser suficiente para evitar este problema ya que lo que un oscilador de este tipo pudiera radiar al espacio es tan poco, que para poder captar algo por el detector de detectores debería de estar colocado poco mas que encima de la antena.
Pero volvamos al tema que nos preocupa, el conjunto receptor recibe la señal de microondas por la antena que es amplificada a unos niveles que se pueden tratar en el mezclador. El VCO se ajusta a una frecuencia para que la diferencia de señales sea igual a la frecuencia intermedia (repasar el heterodinaje) y ya está, conseguido el primer paso.
Este oscilador local de frecuencia variable, su frecuencia de trabajo es controlada por la electrónica, de tal manera que podemos hacer varias cosas con el control. Por ejemplo, si queremos solamente controlar una frecuencia la electrónica le dirá al oscilador local que permanezca en una frecuencia fija y ya está.
Pero supongamos que queremos no solo escasear una frecuencia determinada, sino un rango de frecuencias. Bueno, la electrónica puede gestionar el VCO para que haga esto:
Escanear bandas: La electrónica hace un barrido de frecuencias, es decir, va variando la frecuencia del VCO entre unas frecuencias límite (banda) hasta que detecta algo, entonces para en esa frecuencia y verifica que efectivamente se recibe algún radar de la DGT.
Escaneos acotados: Supongamos que no quiero escanear bandas enteras, sino simplemente trozos de bandas o incluso unas cuantas frecuencias fijas. Entonces la electrónica controla el oscilador local de tal manera que paso de una frecuencia a otra que tienen programada de escaneo hasta que detecta algo y se para.
De ahí se pude deducir que el escaneo acotado da distancias mayores de detección que el escaneo de bandas, pero no es porque tenga mayores distancias, sino porque el tiempo de detección es menor, y eso se traduce en que avisa antes.
COLOFON FINAL
Pues hasta aquí he intentado desvelar un poco lo que se encuentra dentro de estos cacharritos denominados “detectores de radar”. Los conocimientos y el nivel han querido ser para que el profano en materias de electrónica no tenga ninguna dificultad en entender, a muy grosso modo, como funciona esto.
Quien se haya leído estos 6 artículos habrá adquirido unas nociones básicas suficientes como para entender un poco el funcionamiento elemental de estos equipos.
Aún me queda por escribir el último artículo de esta saga, que voy a dedicar un poco a la electrónica de control, pero “la casa ya está construida y solo voy a pintarla un poco” ya que el último artículo de esta serie será para ver como un microprocesador, puede controlar todas estas señales que hemos visto y transformarlas en lucecitas, pitos y gaitas.
Así que en el próximo y último capitulo hablaremos de:
– La electrónica de control.
– Pitidos, lucecitas y gaitas.
Articulos relacionados
Radar(I): Introducción y generalidades
Radar(II): Ondas electromagnéticas, efecto Doppler
Radar(III): Aplicación del efecto Doppler, microondas
Radar(IV): Antenas, guiaondas y otros menesteres
Radar(V): Mezclando frecuencias
Radar(VI): Amplificaciones y osciladores
Radar(VII): La electrónica de control




















Olé!!! Muy buenos.
La verdad que si, muy buenos los seis artículos que van por el momento. Gracias a ellos se ha podido dejar una categoria de articulos sobre tecnica con un nivel muy majo.
estubo bien interesante 😆 😯 y completo
sigan asi 😀 💡 😎